Training-free spatial reasoning agent
SpatialClaw Rethinking the action interface for agentic spatial reasoning.
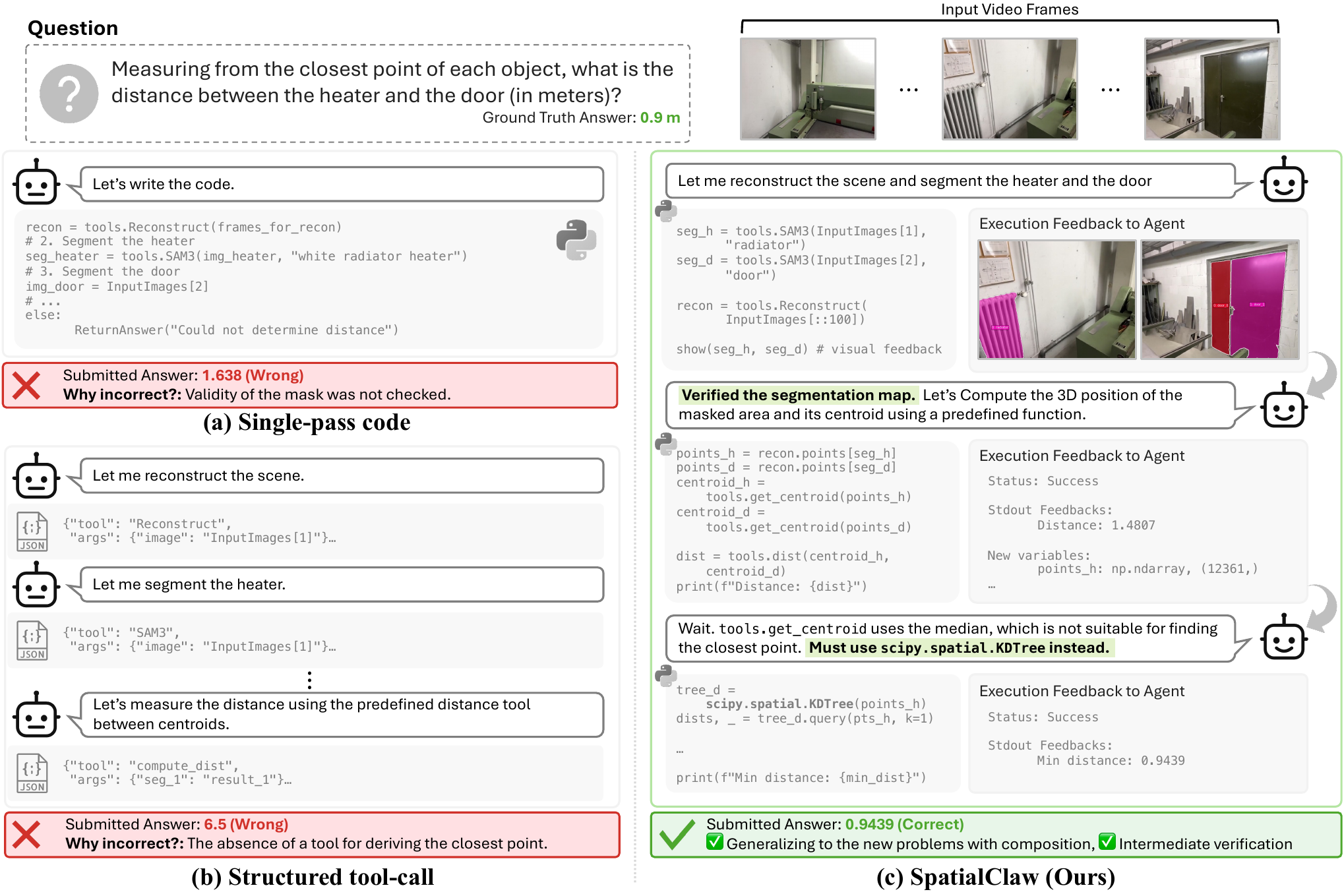
Code is the right action interface for spatial reasoning agents.
†Affiliated with KAIST. Work done during Seokju Cho's internship at NVIDIA.
SpatialClaw
SpaceTools
pySpatial
No-tool
Single-image
Multi-view
Video & 4D
General spatial
General video